Lecture 5. Convolutional Neural Networks
Table of Contents
CS231n 课程的官方地址:http://cs231n.stanford.edu/index.html
该笔记根据的视频课程版本是 Spring 2017(BiliBili),PPt 资源版本是 Spring 2018.
另有该 Lecture 5. 扩展讲义资料:
1. A bit of history…
这需要追溯到 1957年。。。 Frank RosenBlatt 发明了第一代感知机器,首次实现了所谓的感知器算法。它在思想上跟得到评分函数的过程类似。也有所谓的参数更新规则,看似和反向传播算法很像,但此时 BP 还没有被发明出来。。。
在 1960 年,Widrow 和 Hoff 发明了 Adaline 和 Madaline。这是首次尝试把线性层叠加整合为多层感知器网络。现在好像与神经网络的层的设计比较接近,但反向传播或者其他的训练方法仍未出现。
到 1986 年,Rumelhart 才首次提出了反向传播算法。从这里开始我们有了最核心的训练方法。
不过再很长一段时间内,我们仍然无法训练超大型神经网络。所谓的神经网络领域曾经常年无人问津,并不用说大规模应用了。但在 2000 年左右,事情开始有了变化。
在 2006 年,Geoff. Hinton 与 Ruslan Salakhutdinov 合作的一篇论文,表明深度神经网络不仅可以训练并且可以高效训练。这仍然不是神经网络现在的样子。此时的网络需要谨慎的初始化才能运行反向传播。他们的方法就是先经过一个预训练阶段,对每一个隐层使用受限玻尔兹曼机(restricted Boltzmann machine)来建模。这样通过迭代训练每一层可以得到一些初始化权重,得到所有的隐层之后,以此来初始化一个完整的神经网络。然后反向传播,微调参数。
实际上,直到 2012 年。神经网络才第一次取得了惊人的成果。深度神经网络的狂潮由此爆发。第一个被攻破的领域是语音识别,Geoff. Hinton 组利用深度神经网络进行声学建模和语音识别。然后是图像识别,在 2012 年,Geoff. Hinton 同一个实验室的 Alex Krizhevsky 发表了里程碑式的[论文](../paper_summary/ImageNet Classification with Deep Convolutional Neural Networks.html),首次让卷积神经网络的框架在 ImageNet 分类大赛中取得了惊人的成绩。CNN 树立了 ImageNet 图像分类任务的标杆,并且大幅降低了误差。此后,卷积神经网络开始得到广泛的应用。
接下来,扯的是视觉任务的历史。。。和 Lecture.1 基本差不多。
远的不说,直接从 1998 年说起。Yann LeCun 首次简单展示了第一个实例:应用反向传播和基于梯度的学习方法,来训练卷积神经网络。这对文档识别非常有效,尤其对邮政编码识别效果极好。因此这些方法在邮政服务中被广泛用于邮政编码识别。然而它并不能扩展到更具有挑战、更复杂的数据。数字非常容易识别,但识别也是有局限性的。
于是在 2012 年,Alex Krizhevsky 提出了一种现代化的卷积神经网络。他提出的网络,我们一般称为 [AlexNet](../paper_summary/ImageNet Classification with Deep Convolutional Neural Networks.html)。但他的网络和 Yann LeCun 提出的卷积神经网络相比,看上去并没有多大差异。它们只是扩展的更大更深。更重要的一部分是它们可以充分利用大量数据可得到的图像(ImageNet 数据集)。同时也充分发挥了 GPU 并行计算能力的优势。
现在,ConvNets 已经被广泛应用。
接下来,小姐姐介绍了各种各样啊的应用,只有一个星系分类和我的领域略有相关:https://arxiv.org/pdf/1503.07077.pdf
2. Convolutional Neural Networks
(First without the brain stuff)
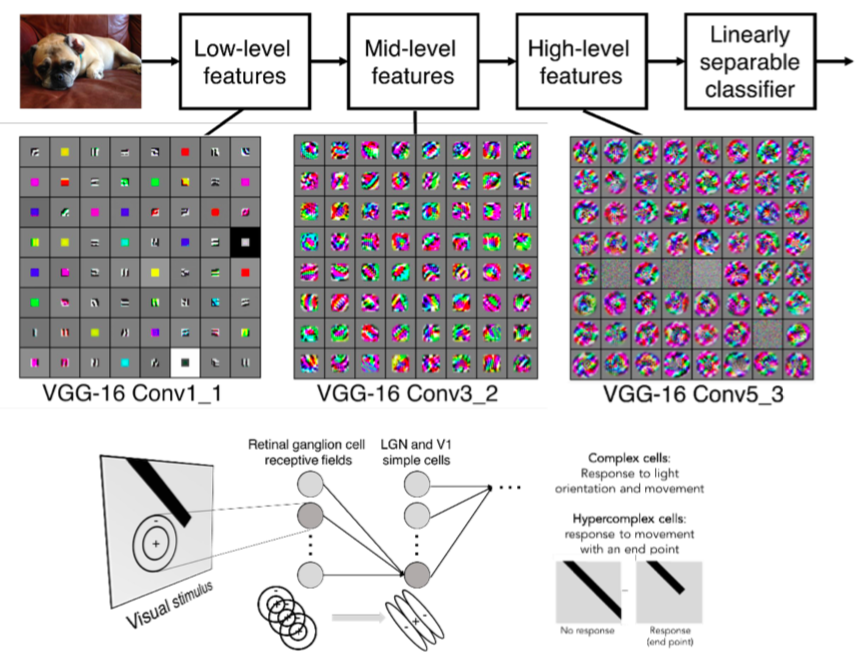
我们从函数的角度来讨论卷积神经网络。(我这里省略掉了卷积的操作细节)
前面几层的卷积核一般代表了一些低阶的图像特征,比如说一些边缘特征。之后几层的特征会更加的复杂,它的内容看起来可能更加丰富。对于那些高阶的特征,可以获得一些比斑点之类的更加丰富的内容。
信号处理中的二维卷积: $$ f[x,y]*g[x,y]=\sum^\infty_{n_1=-\infty}\sum^\infty_{n_2=-\infty}f[n_1,n_2]\cdot g[x-n_1,y-n_2] $$ (elementwise multiplication and sum of a filter and the signal)
巴拉巴拉。。。说了很多,总之就是下面👇总结的好东西:(其实还不全~)
2.1 Summary. To summarize, the Conv Layer:
- Accepts a volume of size $W_1\times H_1\times D_1$
- Requires four hyperparameters:
- Number of filters $K$. (powers of 2, e.g. 32, 64, 128, 512)
- their spatial extent $F$.
- the stride $S$.
- the amount of zero padding $P$.
- Produces a volume of size $W_2\times H_2\times D_2$ where:
- $W_2=(W_1-F+2P)/2+1$
- $H_2=(H_1-F+2P)/2+1$ (i.e. width and height are computed equally by symmetry)
- $D_2=K$
- With parameter sharing, it introduces $F\cdot F\cdot D_1$ weights per filter, for a total of $(F\cdot F\cdot D_1)\cdot K$ weights and $K$ biases.
- In the output volume, the $d$-th depth slice (of size $W_2\times H_2$) is the result of performing a valid convolution of the $d$-th filter over the input volume with a stride of $S$, and then offset by $d$-th bias.
神经元角度的解读就略过了,没啥意思。。。唯独一个感受野(receptive field) 这个概念是很重要的,但是这个讲义还没讲清楚讲全。
对于池化层,我们也可以总结一下:
2.2 Summary. To summarize, the Pooling Layer:
- Accepts a volume of size $W_1\times H_1\times D_1$
- Requires three hyperparameters: (Common settings: $F=2,S=2$ or $F=3, S=3$)
- their spatial extent $F$,
- the stride $S$,
- Produces a volume of size $W_2\times H_2\times D_2$ where:
- $W_2=(W_1-F)/S+1$
- $H_2=(H_1-F)/S+1$
- $D_2=D_1$
- Introduces zero parameters since it computes a fixed function of the input
- Note that it is not common to use zero-padding for Pooling layers
2.3 Demo
最最后,show 出了一个 demo 可以在 CIFAR-10数据集上观察训练过程以及训练后的可视化效果。
https://cs.stanford.edu/people/karpathy/convnetjs/demo/cifar10.html